

"О ТРАЕКТОРИИ движения в повороте написаны целые книги, и это тема бесконечных дискуссий, которая на практике не стоит выеденного яйца", - сказал как-то трехкратный чемпион Формулы-1 Ники Лауда. "Если вы внимательно посмотрите на прохождение поворота какого-нибудь Гран При по телевизору, станет ясно, что все гонщики едут по одной и той же траектории, и даже неспециалист поймет, что другой возможности просто нет", - развивает Лауда свой неожиданный тезис. И он во многом прав: идеальная линия для каждого поворота одна - на скорости машина сама "хочет" по ней идти, и, кстати, классическая траектория движения по каждому известному в мире автодрому давно и четко обозначена в специальных гоночных справочниках. Но не все так просто, как это вольно или невольно пытался представить Ники Лауда. На самом деле траектории двух автомобилей в гонке могут различаться на считанные сантиметры, не заметные на глаз, и уж тем более по-телевизору. А между тем, именно в этих сантиметрах кроется секрет победы.
Главная ошибка многих начинающих автогонщиков заключается в том, что во всех поворотах они строят траекторию по одному и тому же принципу. Принцип этот безусловно верен: потратить в повороте минимум времени и выйти из него с максимально возможной скоростью, чтобы как можно быстрее разогнаться на прямой. Исходя из этого делается вывод, что входом в поворот можно пожертвовать - пусть он будет медленным, лишь бы быстрым был выход. И это правильно. Но только для такого поворота, после которого следует длинная прямая. А если проанализировать повороты любой кольцевой трассы, то выяснится, что существует три их разновидности:
Поворот перед прямой.
Поворот в конце прямой.
Поворот, связывающий два других поворота.
Самый важный поворот - именно тот, который выходит на длинную прямую. Второй по важности - поворот в конце прямой. Кроме того, "быстрый" поворот важнее "медленного", то есть крутого, где выигрыш во времени всегда минимален. Для примера возьмем медленный поворот, который проходится на скорости 70 км/ч, и быстрый, в котором скорость составляет 170 км/ч. Если в результате ошибки вы потеряете 10 км/ч в первом повороте, то ваш автомобиль разгонится с 60 км/ч до 70 легко и быстро. Разгон со 160 до 170 км/ч потребует куда больше времени.
Прежде чем говорить о тонкостях траектории, я предложу вам усвоить аксиому, хорошо известную "мировым" автогонщикам: гонки выигрываются на прямых, а не в поворотах! Предвижу недоумение тех, кто доволен своей манерой прохождения поворотов, чувствует себя в них уверенно и не прочь рискнуть. Совершенно не важно, как быстро вы проходите поворот, если вас потом (или до этого) обгоняют на прямой. Главная задача при прохождении поворота - добиться максимально высокой скорости на прямой. Гонщик, который быстрее выходит из поворота, быстрее достигнет и конца прямой, и, скорее всего, финиша.
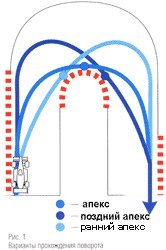
Идеальная траектория проходит через три важнейших точки: точку входа, апекс и точку выхода (рис. 1). Точка входа - то место, где гонщик начинает поворачивать руль - самая важная часть поворота. Она определяет, как будет пройден поворот, где будет апекс и насколько быстрым будет выход.
Апексом я предлагаю называть не геометрическую вершину поворота, а фактическую - то есть ту точку, где внутренние колеса автомобиля проходят ближе всего к его внутренней части. Идеальный апекс может быть в начале поворота, в середине или ближе к выходу. Определить, где должен быть ваш апекс, очень легко. Если в точке выхода вам приходится доворачивать руль, чтобы вписаться в поворот, то ваш апекс был слишком ранним. Если же апекс был, напротив, слишком поздним, то на выходе ваш автомобиль не будет использовать всю ширину трассы. Определить, идете ли вы по идеальной траектории, можно и таким образом. Если после прохождения апекса вам приходится доворачивать руль, а не "распускать" передние колеса, то ваша траектория далека от идеальной. Скорее всего, у вас был слишком ранний апекс - наиболее распространенная ошибка новичков. Если на выходе используется вся ширина трассы, а вам удается как можно раньше и интенсивнее разгоняться, то у вас оптимальный апекс и машина идет по идеальной траектории.
Вернемся к конкретным поворотам. Главным приоритетом при прохождении поворота, ведущего на длинную прямую, будет скорость на выходе из него (рис. 2). Это потребует довольно поздней точки входа и апекса, как можно более раннего разгона с использованием всей ширины трассы на выходе. При одинаковых автомобилях гонщик, который раньше начал разгон, окажется впереди в конце прямой.
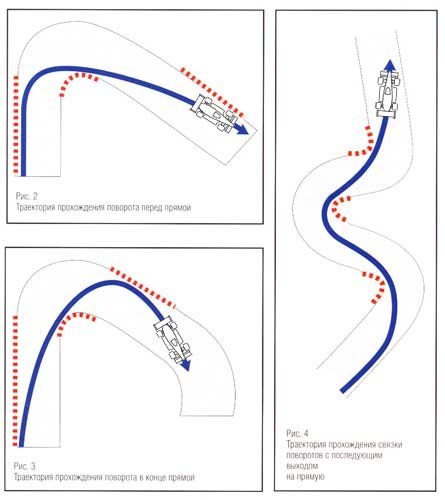
Главная задача в повороте после длинной прямой, который не ведет на другую прямую, - продлить прямолинейное движение, "затянуть" прямую дальше в поворот (рис. 3). Здесь нужен очень ранний апекс и позднее торможение. В таком повороте важна большая скорость на входе, а не на выходе. Кстати, зная об этом, нетрудно догадаться, что зона входа в такой поворот - идеальное место для обгона.
Как проходить поворот, соединяющий две прямые? Ответ: как поворот, ведущий на прямую, используя поздний апекс.
Следующий тип поворотов - это сопряженные, или S-образные (рис. 4). Главным в "шикане" всегда является последний поворот, ведущий на прямую. Проходить его следует с поздним апексом. Предшествующие ему повороты данной связки не так важны, и в них можно пожертвовать скоростью, чтобы траектория последнего стала действительно идеальной для раннего и мощного разгона.
Ники Лауду нельзя упрекнуть в том, что он говорил неправду. В гонке идеальную траекторию очень хорошо видно на покрытии трассы - она представляет собой абсолютно чистую от кусочков резины, пыли, песка и других субстанций дорожку. Проходящие след в след гоночные автомобили сметают весь этот мусор в сторону, и когда обстоятельства вынуждают гонщика съехать с идеальной траектории (например, при обгоне неуступчивого кругового), видно, как трудно ему удержать машину на грязной части трассы.
Однако скажем и о том, что трехкратный чемпион мира, очевидно, счел слишком сложным для неспециалистов. Идеальной универсальной траектории, годной для всех машин и поворотов не существует. Одна и та же машина в разных поворотах потребует различного построения траектории, так же как в одном повороте разных траекторий прохождения потребуют различные машины. К примеру, переднеприводные машины требуют более позднего апекса и распрямленного выхода из поворота. Объясняется это тем,что передние шины у них перегружены: их сцепление делится между рулением и разгоном. В дождь траектории сильно отличаются от "сухих", но это уже тема отдельного разговора.
Отличие идеальной траектории от ошибочной может быть чуть заметным - всего десяток-другой сантиметров влево или вправо. Но в действительности это - настоящая пропасть, разделяющая чемпиона и гонщика-середнячка. Эти сантиметры позволяют чемпиону входить в поворот с большей скоростью, двигаться в самом повороте быстрее, а главное - как можно раньше начинать интенсивный разгон на выходе из поворота.



